因為很雷所以做個紀錄
一開始確認顯示卡的驅動,在設定裡我們可以看到
繪圖:llvmpipe (LLVM 6.0, 256 bits)
代表現在沒有驅動

先到Nvidia官網下載驅動程式

如果已經安裝失敗的可以用如下指令先移除
nvidia-uninstall
接著開始安裝下載的驅動程式
sudo chmod +x NVIDIA-Linux-x86_64-410.93.run
sudo ./NVIDIA-Linux-x86_64-410.93.run
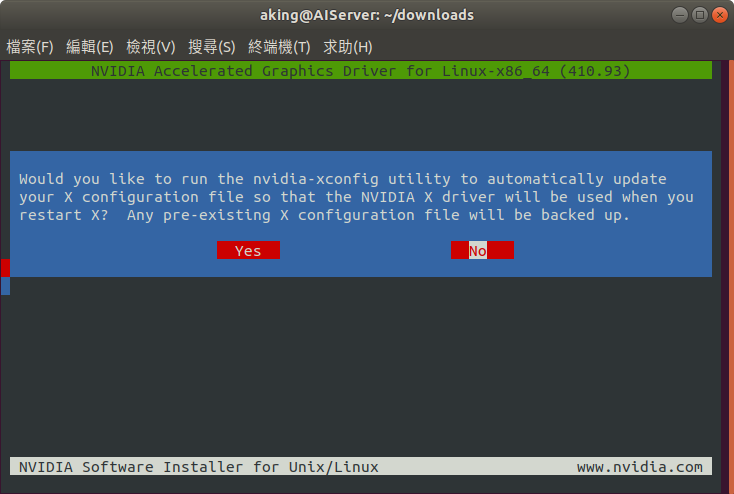
看到如下畫面

這裡就是最雷的地方了,如果驅動程式出現如下畫面
The target kernel has CONFIG_MODULE_SIG set, which means that it supports cryptographic signatures on kernel modules. On some systems, the kernel may refuse to load modules without a valid signature from a trusted key. This system also has UEFI Secure Boot enabled; many distributions enforce module signature verification on UEFI systems when Secure Boot is enabled. Would you like to sign the NVIDIA kernel module?

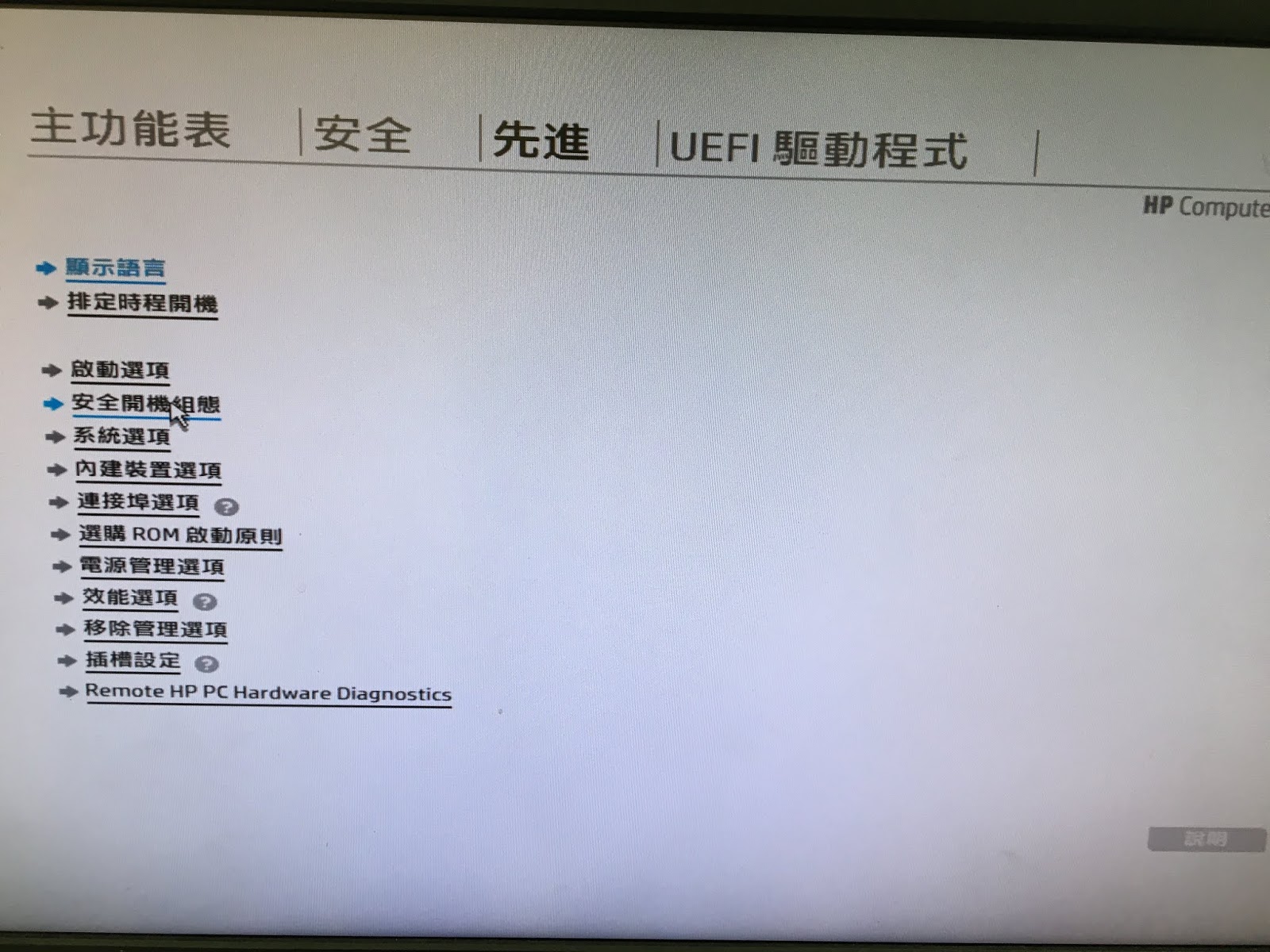
這代表BIOS 有啟動 安全啟動,這將會導致安裝失敗,必須按照如下步驟然後
關閉安全開機才能成功
關閉安全開機才能成功關閉安全開機才能成功nvidia-settings看到如下畫面接著安裝CUDA下載完成之後`sudo dpkg -i cuda-repo-ubuntu1804-10-0-local-10.0.130-410.48_1.0-1_amd64.deb` sudo apt-key add /var/cuda-repo-10-0-local-10.0.130-410.48/7fa2af80.pub `sudo apt-get update` `sudo apt-get install cuda`就可以完成安裝,安裝完成記得充新開機開機完成之後nvidia-smi如果有看到資訊,代表CUDA安裝完成。Nvidia Docker 安裝官方教學網址https://docs.docker.com/install/linux/docker-ce/ubuntu/sudo apt-get remove docker docker-engine docker.io containerd runc sudo apt-get install \ apt-transport-https \ ca-certificates \ curl \ gnupg-agent \ software-properties-common sudo apt-get install apt-transport-https ca-certificates curl software-properties-common curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add - sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu" sudo apt-get update sudo apt-get install docker-ce接著安裝NVIDIA-DOCKER# If you have nvidia-docker 1.0 installed: we need to remove it and all existing GPU containers docker volume ls -q -f driver=nvidia-docker | xargs -r -I{} -n1 docker ps -q -a -f volume={} | xargs -r docker rm -f sudo apt-get purge -y nvidia-docker # Add the package repositories curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | \ sudo apt-key add - distribution=$(. /etc/os-release;echo $ID$VERSION_ID) curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | \ sudo tee /etc/apt/sources.list.d/nvidia-docker.list sudo apt-get update # Install nvidia-docker2 and reload the Docker daemon configuration sudo apt-get install -y nvidia-docker2 sudo pkill -SIGHUP dockerd # Test nvidia-smi with the latest official CUDA image docker run --runtime=nvidia --rm nvidia/cuda:9.0-base nvidia-smi過程中出現有些套件無法安裝。這可能意謂著您的要求難以解決,或是若您使用的是 unstable 發行版,可能有些必要的套件尚未建立,或是被移出 Incoming 了。 以下的資訊或許有助於解決當前的情況: 下列的套件有未滿足的相依關係: nvidia-docker2 : 相依關係: docker-ce (= 5:18.09.1~3-0~ubuntu-bionic) 但 5:18.09.1~3-0~ubuntu-xenial 卻將被安裝或 docker-ee (= 5:18.09.1~3-0~ubuntu-bionic) 但它卻無法安裝 E: 無法修正問題,您保留 (hold) 了損毀的套件。表示Docker版本與Nvidia-Docker不匹配,這時候要重新安裝Docker成他說的版本5:18.09.1~3-0~ubuntu-bionic#這個指令可以看所有版本apt-cache madison docker-ce從新安裝sudo apt-get install docker-ce=5:18.09.1~3-0~ubuntu-bionicsudo apt-get install -y nvidia-docker2 sudo docker pull nvidia/cudadocker run --runtime=nvidia --rm nvidia/cuda:9.0-base nvidia-smi
















留言
張貼留言