由於買到了瑕疵品的陀螺儀,所以又改買GY86 陀螺儀,在等待物流的時間先來搞機架,剛開始規畫的時候,本想使用冰棒棍當成機架: 如圖

MAKER的賤骨頭欣起一個想法不能自我: [用3D印表機吧]
這就這樣凌晨12點開始在youtube上學習著Sketchup,分享一下我看的影片的網址。
https://www.youtube.com/watch?v=Tch6UaEx5rM
https://www.youtube.com/watch?v=aaW5W-xrXsA
https://www.youtube.com/watch?v=IwWZiywD8iM&list=PLuCfUK-rgv06ijJLv1TCgd8rYSbeJ7ama
特別感謝楊比比,他的教學都很短,剛好可以在注意力快要消失前就上完一堂課。節奏很棒,停不下來。
感謝以上這些這作者,讓我可以很快的入門SketchUp,也感謝GOOGLE提供這套軟體。
花了幾個小時熟悉一下,然後先在紙上畫出如下圖形,放上螺旋槳,感覺真有FU

然後安裝STL輸出套件, Sketchup STL 就可以把模型輸出成STL,再將檔案給予打印的廠商
或是跪求朋友(笑),過幾天就可以將這個裝上我的機身上。
題外話:關於3D列印
這個模型一開始就以好印為基礎設計(也很好畫XD),3D列印目前最夯的FDM熔融沉積成型 (Fused Deposition Modeling ),這種列印方式有一種非常致命的問題就是支撐(support)很難拆,所以友人就建議我最好不要產生支架,將模型分開列印減少支架的產生,這次的機架很簡單且也不需要支撐列印完成拿下來直接用。
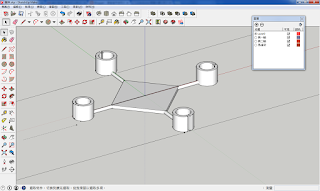
720空心杯,之所以叫做720意思是直徑為7mm 長度為 20mm,如何把它放入這個洞,我用了一點點小技巧,我把這個固定開了15度的開口,然後將內徑設定為6.8mm,想要利用塑膠的彈性夾住馬達。希望會成功。 還好寫了部落格,這個角度看我發現我好像畫錯了,這樣的直徑應該不只7mm吧看起來像是14mm喔我直徑半徑搞錯了,哭。

這幾天下來,其實學習了很多東西,但是也覺得挑戰挺大的,是不是真的可以飛起來內心總有些懷疑與擔心,不過學習到的東西已經內化成自己的工具,飛起來只是最後的犒賞,過程中我已經得到我想要的東西。別只是看了,快點動手吧。
後記:把機架修正之後送打印,然後中間往下挖了1.5mm的凹槽,可減輕重量與固定飛控板。2015/8/25


MAKER的賤骨頭欣起一個想法不能自我: [用3D印表機吧]
這就這樣凌晨12點開始在youtube上學習著Sketchup,分享一下我看的影片的網址。
https://www.youtube.com/watch?v=Tch6UaEx5rM
https://www.youtube.com/watch?v=aaW5W-xrXsA
https://www.youtube.com/watch?v=IwWZiywD8iM&list=PLuCfUK-rgv06ijJLv1TCgd8rYSbeJ7ama
特別感謝楊比比,他的教學都很短,剛好可以在注意力快要消失前就上完一堂課。節奏很棒,停不下來。
感謝以上這些這作者,讓我可以很快的入門SketchUp,也感謝GOOGLE提供這套軟體。
花了幾個小時熟悉一下,然後先在紙上畫出如下圖形,放上螺旋槳,感覺真有FU

然後安裝STL輸出套件, Sketchup STL 就可以把模型輸出成STL,再將檔案給予打印的廠商
或是跪求朋友(笑),過幾天就可以將這個裝上我的機身上。
題外話:關於3D列印
這個模型一開始就以好印為基礎設計(也很好畫XD),3D列印目前最夯的FDM熔融沉積成型 (Fused Deposition Modeling ),這種列印方式有一種非常致命的問題就是支撐(support)很難拆,所以友人就建議我最好不要產生支架,將模型分開列印減少支架的產生,這次的機架很簡單且也不需要支撐列印完成拿下來直接用。

720空心杯,之所以叫做720意思是直徑為7mm 長度為 20mm,如何把它放入這個洞,我用了一點點小技巧,我把這個固定開了15度的開口,然後將內徑設定為6.8mm,想要利用塑膠的彈性夾住馬達。希望會成功。 還好寫了部落格,這個角度看我發現我好像畫錯了,這樣的直徑應該不只7mm吧看起來像是14mm喔我直徑半徑搞錯了,哭。

這幾天下來,其實學習了很多東西,但是也覺得挑戰挺大的,是不是真的可以飛起來內心總有些懷疑與擔心,不過學習到的東西已經內化成自己的工具,飛起來只是最後的犒賞,過程中我已經得到我想要的東西。別只是看了,快點動手吧。
後記:把機架修正之後送打印,然後中間往下挖了1.5mm的凹槽,可減輕重量與固定飛控板。2015/8/25

留言
張貼留言